RTSim是實現xxxx控制系統研制、調試、測試與半實物仿真的重要技術手段,可實現控制系統原型樣機的模塊化設計、開發和仿真;實現數字模型到實時代碼的自動轉換和分布式實時仿真;具有豐富的硬件接口,實現數字模型與實物的互換,支持硬件在回路的半實物仿真;能夠快速實現將SimuLink的MDL文件轉化成RTX環境下的實時運行程序RTSS,完成將SimuLink模型實時化的分布、自動參數修改、數據存儲,快捷應用于實時/半實物仿真,提高設計人員的工作效率。
軟件包主要包括以下幾部分:
● RTX環境下RTW實時代碼模版生成文件(TLC)模塊
● RTX環境下RTW實時代碼模版聯編文件(TMF)模塊
● 實時程序入口文件(C/C++)模塊
● RTX/Windwos通信庫模塊
● RTSim界面監控與管理模塊
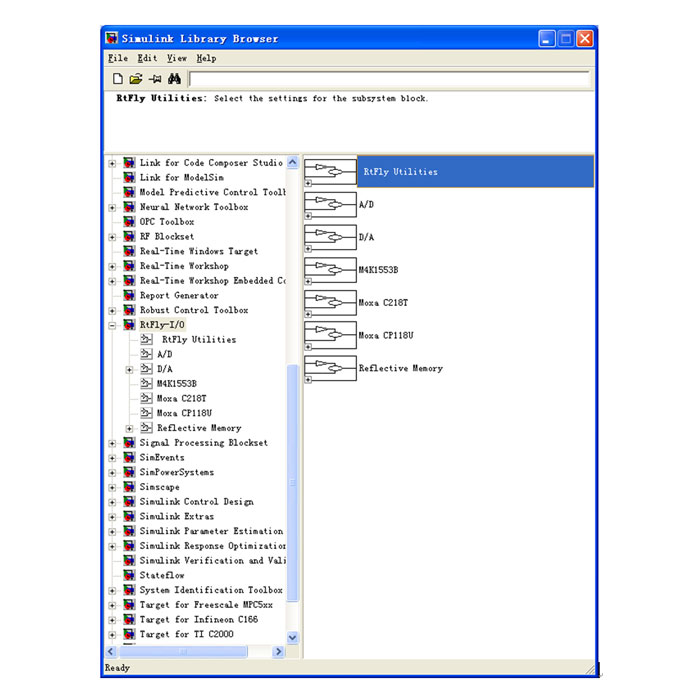
● SimuLink環境下IO驅動
● 模型編譯與下載模塊
● 網絡下載與通信模塊
● 數據顯示與記錄模塊
● 工程文件管理模塊
● 實時代碼運行管理模塊
● RTX實時開發與運行環境
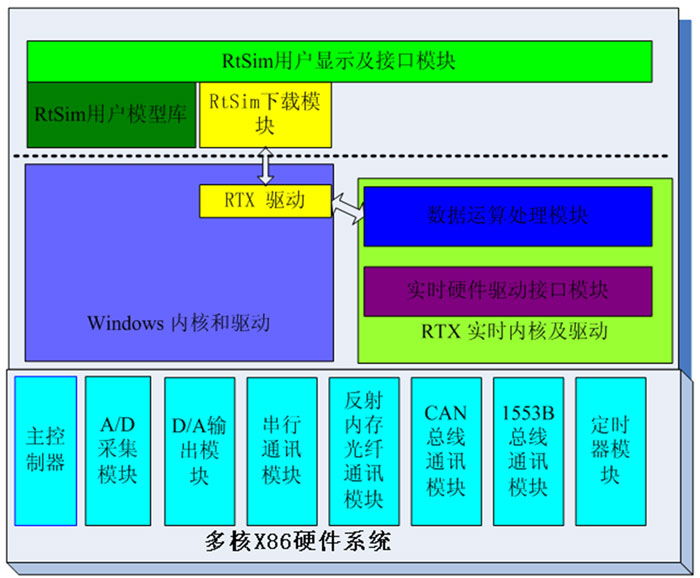
● 利用Windows+RTX的實時特性和RTSim管理軟件的優點,提供一套開放的、開發簡單的實時測控平臺。
● 不對Windows系統本身做任何修改,即滿足微秒級的實時特性,實時系統時間分辨率最小100ns。
● 支持多任務、多內核、獨占CPU,微小實時內核。
● 基于VC開發環境實現工程配置、硬件配置、代碼編輯、編譯、支持實時驅動庫。
● 構建CPCI架構的驗證系統,優于2.4GHz處理能力,1G內存,功耗小于46W。
● 實時平臺性能指標:
- 時鐘分辨率0.1us
- 最小定時周期:1us
- 最大進程數量:1000個
- 最大線程數量:不限,取決于系統資源
- 線程優先級:128個
- 線程切換時間:0.5~2us
- 持續的中斷響應頻率:30KHz
- 最小定時器誤差:<2us
- 編程語言支持:C\C++
- 開發工具支持:VS2005、VS2010
- 支持用戶提供定時器卡進行定時/p>
- 具備豐富的外圍板卡實時驅動和測試軟件支持C\C++
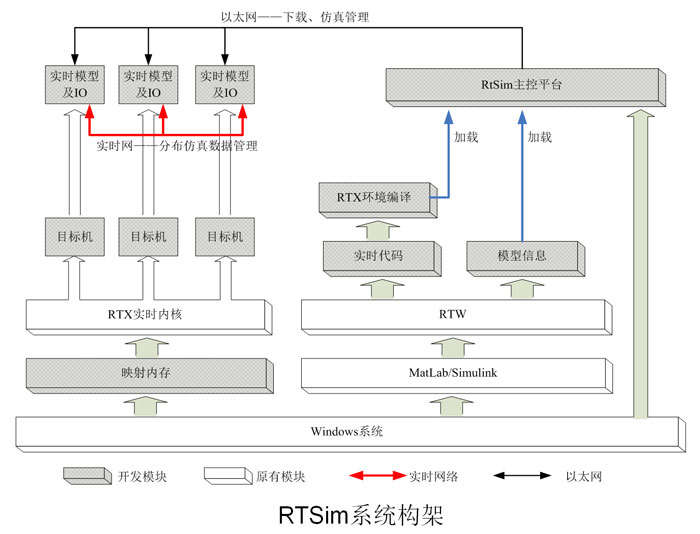
RTSim系統基于RTX(Windows嵌入式實時系統)實時系統、以Simulink為模型開發工具的快速原型系統。該系統能夠快速將Simulink模型轉化為RTX環境下實時模型,并能夠實現Simulink模型自動編譯與下載、仿真參數在線修改、仿真數據實時存儲、自動分布仿真、仿真工程文件管理功能。該系統能夠實現復雜大系統的閉環實時仿真,也能快速實現單個部件原型測試, 通過SimuLink自帶模型仿真驗證了該系統的可靠性、仿真的準確性。
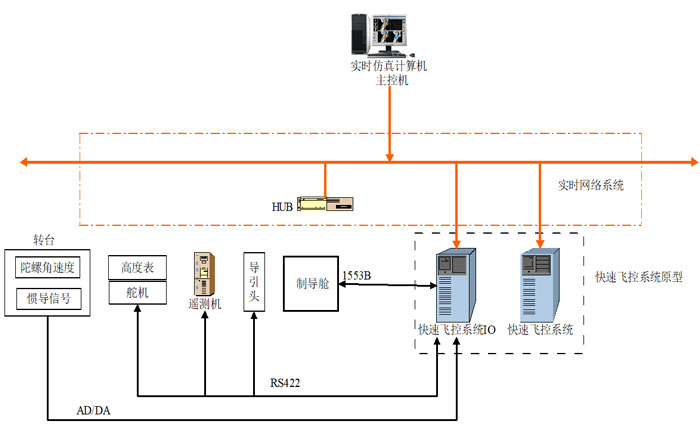
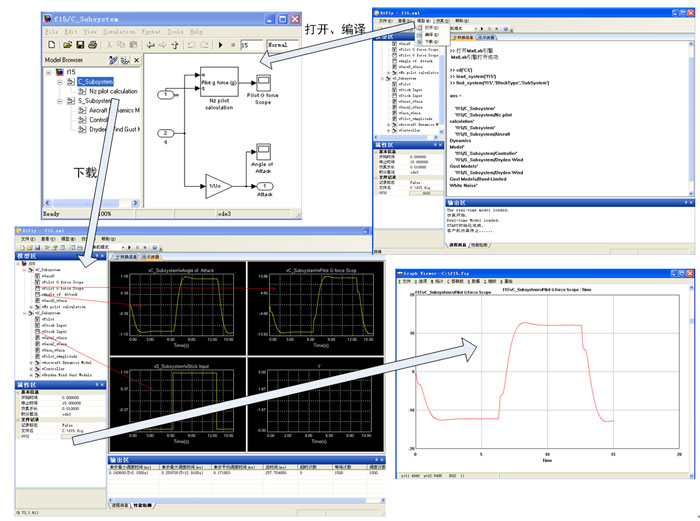
使用MATLAB/Simulink/RTW、RtFly完成制導系統一體化開發環境設計:
● RTSim主控端將Simulink下建立的模型分割并結合RTW生成分布式模型代碼并下載到仿真機上,仿真機并進行實時分布仿真
● 在原型設計師先后,使用編譯器等工具,完成從標準C代碼向目標硬件平臺上的產品代碼的轉換工作
● 最后,使用真實物體對控制器進行測試
--
--
--
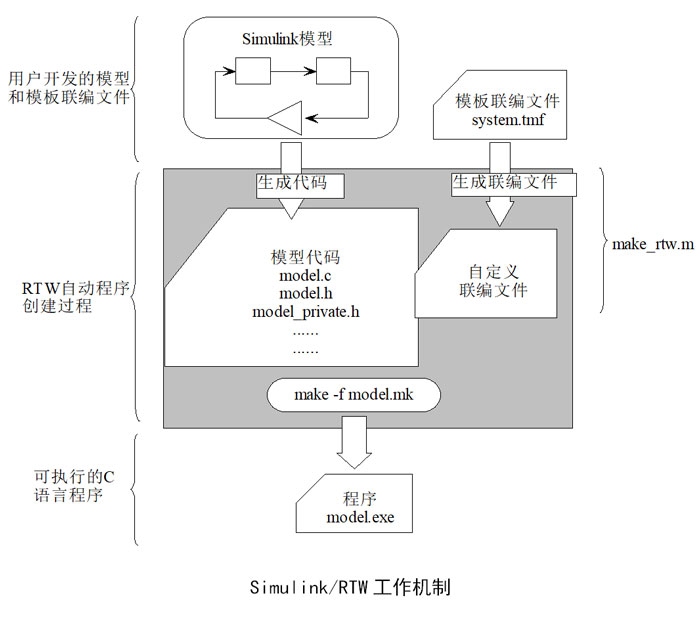
Simulink是一個用來對動態系統進行建模、仿真和分析的軟件包,Simulink提供了豐富的模塊庫以幫助用戶快速地建立動態系統模型。RTW是一個基于Simulink的代碼自動生成環境,它能直接從Simulink的模型中產生優化的、可移植的和個性化的代碼,并根據目標配置自動生成多種環境下的程序。RTW將用戶所設計好的系統模型,在不須撰寫任何程序代碼的情形下,即可直接轉換為原代碼。
--
● 完全與Matlab/Simulink兼容
● 對仿真模型進行分割,自動編譯和下載仿真模型,支持分布式仿真
● 不需要額外的處理器,在Windows98/NT/2000/XP操作系統的PC機上直接運行
● 單CPU計算機控制的閉環系統采樣頻率高達10KHZ
● 將板卡各端口做成相應的Simulink模塊,通過Simulink直接對硬件端口進行讀、寫操作
● 直接在Simulink中實現控制器并組成閉環系統,使控制實際對象如仿真一樣簡單
● 實時控制同時也可以進行理論仿真以方便比較結果
● 控制器參數可在Simulink或快速原型系統窗口進行實時在線調
● 系統中的信號通過Simulink或快速原型系統示波器實時觀測,實時結果可保存為數據文件
● 提供給與多種實時網絡系統的分布仿真模式,包括基于VMIC等標準化接口,并在各種模式下保證仿真模型的一致性
● 支持計算機串口的確定性響應
● 采用XML作為數據以及消息存儲、交互和顯示
● 首先應用Simulink建立該系統仿真模型,確認數字仿真結果正確無誤后,將模型設置為定步長仿真模式。
● 應用快速原型管理平臺調用Simulink/RTW工具將模型生成實時代碼,并應用VC++編譯成RTX環境下RTSS實時運行程序,將模型配置信息(參數、IO、仿真條件)生成XML工程文件。
● 應用快速原型管理平臺加載XML工程文件,完成仿真參數、仿真條件、數據文件等設置后,開始仿真。
--
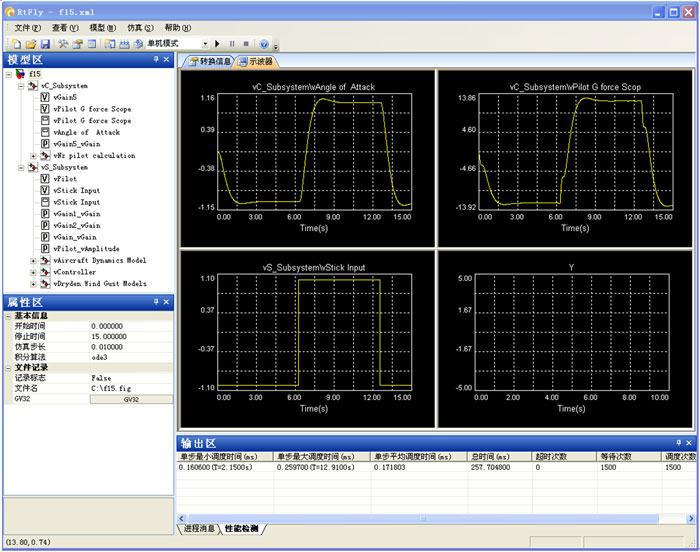
● RTSim系統運行監控界面
--
● 功能區。RTSim主要包括以下幾個功能區:
- 模型區:當加載編譯后的simulink模型后,將加載simulink模型按樹形模式,包括子模型(只包含根一級)、變量、參數、示波器
- 屬性區:對simulink實時模型的屬性信息進行預覽和修改,包括仿真起止時間、步長、積分算法、文件記錄的信息、參數設置等。
- 示波器區:對simulink模型中的示波器進行一一映射
- 轉換信息區:對simulink模型的加載、編譯等進行顯示
- 輸出區:完成仿真性能檢測以及simulink實時模型加載管理
● 菜單。主要由文件、模型與仿真組成。
- 文件。打開:打開RTSim工程文件;保存:保存修改后的RTSim工程文件
- 模型。打開:加載Simulink模型;編譯:完成Simulink模型在RTX環境下的編譯;加載:加載RTX環境下的Simulink模型
- 仿真。開始:開始仿真;停止:停止仿真
● 串口 RS232/422/485
● 模擬量轉數字量 A/D
● 數字量轉模擬量 D/A
● 數字輸入輸出 DIO
● 1553B
● VMIC5565
● 國防安全和軍事工程
● 航空和航天仿真系統
● 機器人系統
● 機械工業自動化,智能制造
● 醫療儀器
● 衛星模型仿真系統
● 分布式實時仿真系統
● 實時仿真測試系統
● 飛行模擬器顯控系統
● 分布式實時仿真和轉臺控制系統
---End---